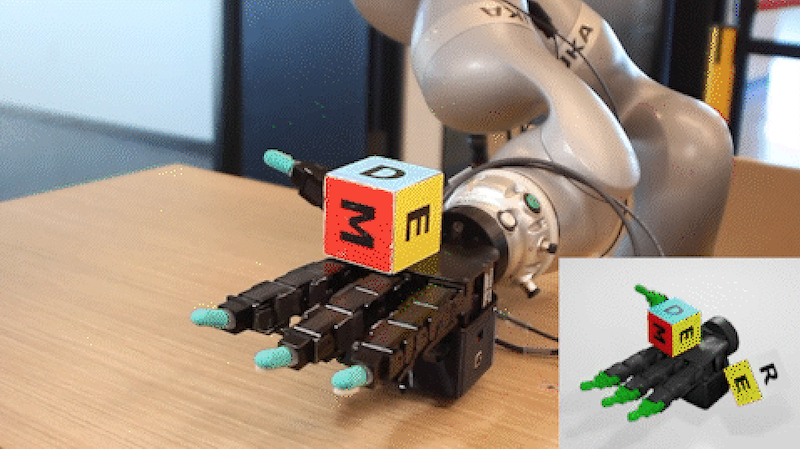
Nvidia researchers show how training in simulation enables the transfer of complex manipulation skills to a robot hand with project DeXtreme
The human hand is one of the most remarkable outcomes of millions of years of evolution. The ability to pick up all sorts of objects and use them as tools is a crucial differentiator allowing us to shape the world around us.
For robots to work in the everyday human world, the ability to deftly interact with our tools and the environment around them is critical. Without that capability, they will continue to be useful only in specialized domains such as factories or warehouses.
While it has been possible to teach robots with legs how to walk for some time, robots with hands have generally proven to be much trickier to control. A hand with fingers has more joints, and they must move in specific coordinated ways to accomplish a given task. [Read more…] about Reinforcing the value of simulation: Teaching dexterity to a real robot hand