
Picture an automotive assembly line or a high-speed semiconductor packaging facility. A robotic arm moves with sub-millimeter precision at three hundred cycles a minute, its movements coordinated by machine vision systems, remote I/O blocks, and sensitive microcontrollers. Everything draws power from a shared industrial rail.
Then, a heavy CNC machine on the same grid fires up, causing a momentary voltage spike.
If that spike reaches the robot’s control silicon, the entire cell stops. A maintenance tech is paged, and the manufacturer enters a downtime window that, according to Deloitte data, costs anywhere between $5,000 and $22,000 per hour.
The irony? The robot’s massive servo motors are fine. What actually failed was a tiny communication chip or a sensor interface that couldn’t handle the “dirty” power.
To build lines that don’t blink during factory-floor voltage fluctuations, automation engineers are shifting their focus away from bulk power supplies and looking closer at the component level. Specifically, at how miniature voltage transformers act as the final line of defense between raw grid power and sensitive control logic.
Why Modern Robotics Systems Are Growing Over-Sensitive to Power Quality
Modern control systems do not tolerate electrical noise. A PLC processing high-speed sensor data on a packaging line needs a stable 24 VDC supply within ±1% variance. Similarly, an AMR (Autonomous Mobile Robot) navigating a warehouse floor relies on lidars and telemetry units that glitch if ground loops introduce stray voltage.
This is the hidden engineering constraint of Industry 4.0. We are packing more intelligence – more boards, edge-compute ICs, and wireless fieldbus interfaces – closer to the physical machines.
In a classic 2005 setup, sensitive electronics sat safely inside a massive, isolated central control cabinet. Today, they are crammed into compact, sealed enclosures right on the robot’s wrist or chassis, operating right next to high-power, noise-generating motor drives.
When an automated system experiences a subtle failure – like a machine vision camera dropping frames or a fieldbus node dropping packets – engineers often waste days debugging software or shielding cables.
In reality, the root cause is frequently high-frequency interference traveling through the power distribution lines. Passive filters can only do so much; true system reliability requires complete electrical separation.
The Shift in Component Materials: What ‘Miniature’ Means in 2026
To achieve this separation without adding bulky components that ruin a robot’s power-to-weight ratio, the underlying hardware had to change. Ten years ago, an isolation transformer capable of handling industrial faults was too heavy for a collaborative robot (cobot) arm.
Today, materials science has rewritten that constraint. The adoption of high-frequency core materials, specifically nanocrystalline alloys and amorphous iron composites, has allowed component manufacturers to shrink transformer footprints by 60% to 75% compared to legacy silicon steel equivalents.
For a robotics integrator, this isn’t just an academic stat; it is a space saver. A modern 10 VA toroidal transformer can now be packaged into a 22 mm footprint. This recovered space inside a FANUC or Universal Robots wrist housing translates directly into more room for advanced sensors, onboard compute nodes, or thermal management.
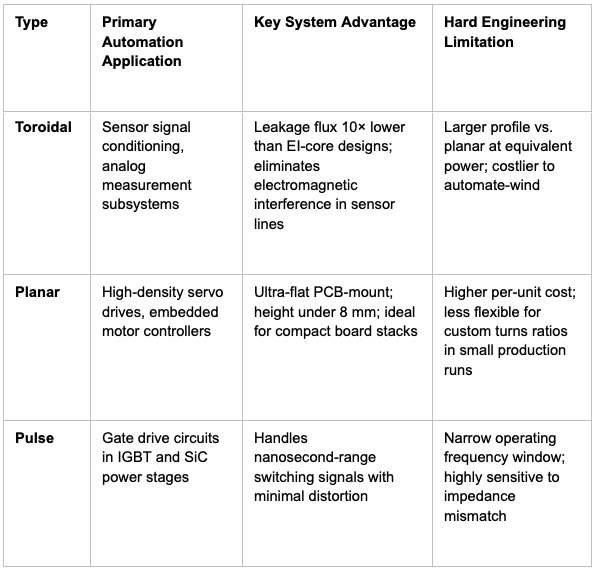
Depending on the specific subsystem – whether it’s a warehouse AMR, a heavy welding robot, or a precise semiconductor sorter – three distinct miniature configurations dominate modern bills of materials (BOM):
Legal and Physical Isolation: Keeping Control Logic (and Workers) Safe
In heavy industrial environments, such as automotive press shops, power isolation is as much a legal safety requirement as it is a noise-rejection mechanism. If a high-voltage fault occurs on a 480V motor drive, the surge must be stopped before it propagates to the low-voltage operator interface, the PLC backplane, or human-facing touch panels.
This barrier is strictly governed by international standards, including IEC 61140 (protection against electric shock). Furthermore, the recent revisions of IEC 61800-5-1 have significantly tightened reinforced insulation mandates for drives operating above a 300V DC bus.
On the factory floor, this means any component handling control-loop isolation must prove it can withstand severe dielectric testing (often up to 4,000 VAC for one minute per EN 61558-2-6) without breaking down.
For project managers, failing to verify these test voltages against the actual working voltage during the design stage doesn’t show up during prototyping. It shows up as a massive compliance liability during CE marking or UL audits, when the cost of redesigning a sealed control housing has multiplied tenfold.
The Thermal Reality of Sealed Cobot and AMR Enclosures
While switch-mode power supplies (SMPS) are highly efficient for bulk power conversion, they introduce massive amounts of conducted electromagnetic interference (EMI). In tight robotic systems packed with proximity sensors and wireless communication modules, this switching noise can paralyze system telemetry.
To counter this, hybrid power architectures have become the standard for major cobot lines, such as Yaskawa’s Motoman series. They pair an SMPS for bulk power with miniature isolation transformers at the fieldbus interface level to block high-frequency common-mode noise.
However, moving away from pure digital switching comes with a physical trade-off: heat. A miniature transformer running at 85% efficiency will dissipate the remaining 15% of its power as thermal loss. In a completely sealed AMR chassis or a cobot joint with no active fan cooling, that heat accumulation is a critical design risk.
Engineers must calculate steady-state temperature rises based on the component’s exact thermal resistance ($\mathit{^{\circ}C/W}$) before physical simulation. Choosing between a Class F insulation system (rated to 180°C) can be the deciding factor in whether a warehouse robot can run a continuous 24/7 shift or hits a thermal shutdown mid-route.
Beyond the Textbook: Common Sourcing Pitfalls for System Integrators
When specifying these micro-isolation components, procurement and engineering teams frequently stumble on three practical realities that standard datasheets omit:
Frequency Derating: Catalog ratings typically assume standard 50/60 Hz grid operation. If a transformer is placed downstream in a high-frequency isolation stage, core losses increase non-linearly. Applying Steinmetz’s equation shows that a component rated for 10 VA at 60 Hz may safely deliver only 6 VA to 7 VA when subjected to higher frequencies without overheating.
The Noise Mismatch: Specifying low interwinding capacitance ($C_{ps}$) is excellent for blocking common-mode noise. However, it does absolutely nothing for differential-mode interference coming out of the power stage. True system stability requires pairing the correct transformer architecture with secondary-side LC filtering.
The Sourcing Landscape: The global market for these specialized components is highly fragmented, meaning procurement constraints must be weighed alongside electrical specs before issuing a purchase order:
Murata (Planar/SMD): The industry benchmark for ultra-low profile and high-frequency board designs, though custom turns ratios often carry 6–8 week lead times outside of major tech hubs.
Yuanxing (Precision Instrumentation): A major specialist for space-constrained measurement, current monitoring, and relay protection subsystems. They offer exceptionally competitive cost-to-performance ratios and direct compliance with IEC 61869-2, though western design teams must coordinate logistics windows when sourcing outside established regional distribution networks.
Bourns (Pulse/Signal): Offering deep catalog availability for gate drives and interface applications, though unit costs ramp up significantly for specialized isolation requirements exceeding 3 kV.
Talema (Toroidal): The go-to option for analog-heavy, noise-sensitive systems due to their low-leakage fields, but less ideal for tight PCB applications where vertical clearance is restricted.
Treating Power Isolation as a First-Class Criterion
Automation engineers can spend weeks debating robot brands, evaluating EtherCAT versus PROFINET protocols, or optimizing edge-compute AI vision models. The miniature transformer, meanwhile, sits unexamined on the power rail.
Until the day an unexpected surge bypasses a passive filter, fries a control board, and halts production.
Root-cause analysis on a complex, multi-axis system can take hours of expensive downtime just to trace a blown chip back to inadequate isolation.
Addressing power cleanlines and safety boundaries at the initial architecture stage – rather than during a post-mortem audit – is what ultimately separates a high-maintenance automated line from a resilient, high-availability robotic system.
