
Fanuc has further strengthened the integration between Nvidia’s open robot simulation reference framework Nvidia Isaac Sim and Fanuc’s robot simulation software RoboGuide, enabling intuitive operation within a virtual factory and realizing highly accurate, seamlessly integrated digital twins.
At the International Robot Exhibition held last December in Tokyo, Fanuc demonstrated the technology that imports robot motion simulations created in RoboGuide into Nvidia Isaac Sim, reproducing precise trajectories and cycle times in a virtual environment using the same control algorithms as the actual robot.
Today Fanuc announces, with the enhanced integration, the two systems are now more tightly integrated, delivering an even more practical and efficient simulation environment for robot testing and virtual commissioning.
The first mode of integration places Nvidia Isaac Sim at the forefront, with RoboGuide operating in the background to ensure accurate robot behavior in the virtual space. RoboGuide is tightly integrated with Isaac Sim, with continuous direct communication.
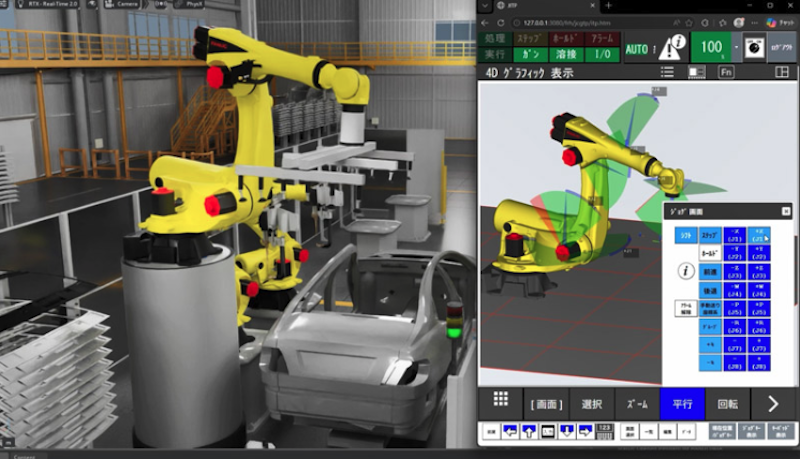
In this new environment, users can intuitively operate robots in Isaac Sim in real time from virtual or physical teach pendants connected to RoboGuide – just as if they were controlling an actual robot.
Users can perform jogging operations, teach robot programs, execute the programs, and verify results directly within Isaac Sim. This enables intuitive and efficient pre-installation studies and process design for robots within GPU accelerated physically accurate sensor and environment simulations.
By further leveraging Nvidia Isaac Lab open robot learning framework and Nvidia Omniverse libraries, high-precision simulations of tasks that were traditionally difficult to reproduce – such as handling flexible components like cables or performing insertion and assembly operations – become possible.
Robots operating in Isaac Sim maintain identical trajectories and cycle times to real machines through integration with RoboGuide, removing the sim-to-real gap.
This combined environment also supports reinforcement learning and imitation learning, accelerating the evaluation and deployment of physical AI systems.
The second integration mode places RoboGuide at the forefront, while the Nvidia PhysX physics engine enables advanced simulation in the background.
With this enhancement, RoboGuide now utilizes PhysX, allowing accurate simulation of complex tasks such as bin picking, which were previously difficult to simulate.
Randomly piled parts can be realistically simulated using physics-based modeling, while RoboGuide’s 3D Vision system identifies part positions and enables robots to perform pick-and-place operations.
Real-world scenarios – such as determining when a robot cannot extract a specific part and selecting an alternative – can be replicated virtually.
This advancement allows users to complete feasibility studies for bin picking systems in a virtual environment, eliminating the need for extensive trial-and-error using actual parts.
Combined with Nvidia PhysX, RoboGuide significantly improves the efficiency of designing and deploying bin picking systems that previously required considerable time and expertise on-site.
Fanuc robot and Nvidia GR00T N robot foundation model to fold T-shirts by imitation learning
At this Open House Show, Fanuc will demonstrate a Dual-Arm system using two CRX collaborative robots to fold flexible objects (T-shirts) by imitation learning, using Nvidia’s open robot foundation model Nvidia Isaac GR00T N.
Folding flexible objects like T-shirts requires continuous adaptation of robot motion to changing shapes, making it difficult to achieve using conventional playback teaching or vision-based robot path compensation.
In this demonstration, an operator performs the folding task using CRX robots, and the system learns from these examples through imitation learning. The dual-arm CRX system is trained to replicate the task and acquire the necessary techniques to complete the folding process.
With motions generated in real time through imitation learning, the CRX robots autonomously fold T-shirts while visually recognizing the object using cameras. Traditionally, imitation-learned robot motions tended to appear segmented and jerky.
By combining Fanuc’s advanced motion control technology with the Nvidia GR00T N model, the system achieves smooth, continuous movement. Visitors can experience a live demonstration of the dual-arm robot autonomously folding T-shirts in real time.
Fanuc robot system powered by Nvidia Jetson Thor platform
At last year’s International Robot Exhibition in Tokyo, Fanuc introduced an “AI robot that avoids human” based on Fanuc robot’s open platform. The system has been upgraded with Nvidia’s latest robotic computer Nvidia Jetson Thor.
By replacing Nvidia Jetson AGX Orin module with Jetson T5000 module, the system’s AI compute has improved by more than 7.5 times. At the exhibition, visitors can experience a robot that avoids human movement more quickly and smoothly, utilizing the powerful capabilities of Jetson Thor.
AI robot powered by Nvidia Jetson Thor platform
At the Fanuc new product exhibition to be held in May, visitors can experience firsthand the operation of robots in a virtual space, high-precision simulations, physics simulations using Nvidia PhysX, demonstrations of dual-arm robots trained through imitation learning on Nvidia’s robot foundation model, and collaborative robot systems featuring the latest Nvidia edge computing platform.
