
For decades, robotics was viewed as a niche engineering discipline inhabited largely by researchers, academics, and highly specialized industrial automation companies.
Development was expensive, fragmented, and slow. Even simple mobile robots often required years of work and highly customized software stacks.
Today, robotics sits at the center of one of the largest technology investment waves in modern industrial history.
Governments are pouring billions into automation, manufacturers are racing to digitize operations, AI companies are building “physical AI” systems for real-world machines, and venture capital firms are funding everything from warehouse robots and humanoids to autonomous tractors and delivery systems.
At the heart of much of this transformation lies an idea that once seemed almost idealistic: open-source collaboration.
Increasingly, the robotics industry is being built not by isolated companies working behind closed doors, but by global communities sharing software, simulation environments, AI frameworks, and development tools.
Modern robotics may still depend on motors, sensors, and actuators, but its real engine is collaborative software development.
ROS and the creation of a common robotics language
No discussion of open-source robotics can begin anywhere other than with the Robot Operating System, better known as ROS.
Originally developed through work at Stanford Artificial Intelligence Laboratory and later heavily expanded by Willow Garage, ROS fundamentally changed how robots were built.
Before ROS, robotics software development was fragmented and highly proprietary. Every university lab, startup, or industrial robotics company often developed its own internal frameworks, drivers, and communication systems. Reusing code between projects was difficult, and collaboration across organizations was limited.
ROS changed that.
Instead of forcing developers to reinvent fundamental robotics capabilities from scratch, ROS provided a modular architecture that allowed engineers to share reusable packages for navigation, perception, manipulation, motion planning, localization, and simulation.
For the first time, robotics developers across the world were effectively speaking a common software language.
The impact was enormous.
ROS dramatically reduced development costs and accelerated experimentation. Small startups suddenly gained access to software capabilities that previously required large engineering teams and years of internal development.
Equally important, ROS helped create a global developer culture around robotics.
In many ways, ROS did for robotics what Linux did for computing.
Today, ROS and ROS 2 underpin large portions of the global robotics ecosystem, from university research projects to commercial warehouse automation systems and autonomous mobile robots deployed in factories.
Major companies including Nvidia, Amazon, ABB, and Bosch now actively participate in open robotics ecosystems that would once have been viewed with suspicion by traditional industrial software vendors.
“Open Robotics”, while it’s become a generic term, is actually the name of the organization behind ROS.
The Construct and the democratization of robotics development
One of the more historically important – though perhaps underappreciated – companies to emerge from the ROS ecosystem was The Construct.
Founded in Spain during a period when robotics remained relatively unfashionable outside specialist engineering circles, The Construct recognized an important problem very early: robotics development was still too difficult for most people to access.
Installing ROS locally was often frustrating and time-consuming. Dependency conflicts, Linux configuration problems, hardware compatibility issues, and simulation setup complexity created major barriers for students and developers entering the field.
The Construct’s solution was remarkably forward-looking for its time.
Its browser-based ROS development and simulation environment allowed users to write code, test robots, and run simulations entirely online. Years before cloud-native robotics became a mainstream topic, The Construct was effectively offering robotics development “in the browser”.
At the time, this seemed highly ambitious. Robotics was still widely viewed as a niche sector with limited commercial upside compared with mobile apps, social media, or mainstream enterprise software.
Yet companies like The Construct persisted during the industry’s quieter years – long before today’s flood of AI and robotics capital arrived.
That persistence now looks increasingly significant.
The Construct anticipated several trends that are now becoming central to the robotics industry:
- cloud robotics
- browser-native development environments
- remote simulation
- robotics-as-a-service infrastructure
- globally distributed robotics education
Its success also illustrates a broader reality about open-source ecosystems: they often create entirely new secondary economies around them.
Without ROS, platforms like The Construct may never have emerged.
Open-source tools that accelerated the robotics industry
ROS itself was only the beginning.
Around it grew a powerful ecosystem of open-source robotics tools that accelerated innovation across multiple domains.
Among the most influential was Gazebo, which helped standardize robotics simulation and virtual testing. Simulation environments became increasingly important as robots grew more autonomous and AI-driven.
Testing robots safely in virtual environments dramatically reduced development costs and accelerated iteration cycles.
Similarly, MoveIt helped simplify robotic manipulation and motion planning, while OpenCV became foundational to machine vision systems used across robotics, manufacturing, autonomous vehicles, and AI perception systems.
Open-source drone autopilot software such as PX4 helped create today’s thriving commercial drone ecosystem, while projects such as Autoware demonstrated how collaborative software development could accelerate autonomous vehicle research.
Collectively, these projects lowered barriers to entry across the industry.
A small robotics startup in 2026 can access software capabilities that would have required tens of millions of dollars to develop internally only 15 years ago.
RoboDK and the industrialization of accessible robot programming
While ROS became dominant in research and mobile robotics, another important company was quietly helping democratize industrial robotics.
RoboDK, founded by Albert Nubiola, emerged from the industrial robotics world rather than the academic ROS ecosystem. The company focused on offline robot programming, simulation, calibration, and CAD/CAM integration.
At the time RoboDK emerged, industrial robotics programming was still heavily fragmented across proprietary vendor ecosystems. Programming industrial robot arms often required expensive vendor-specific software and highly specialized expertise.
RoboDK attempted to simplify that process.
The platform enabled engineers to simulate robotic systems, generate robot programs offline, and work across multiple robot brands inside a more unified environment.
Although RoboDK was not fundamentally ROS-based in the same way as The Construct, it existed within the broader movement toward more accessible and interoperable robotics development.
That distinction is important.
The robotics industry has historically been divided between:
- open research-oriented robotics ecosystems
- highly proprietary industrial automation systems
Companies like RoboDK helped narrow that gap.
Its rise also reflected another important trend that investors increasingly recognize today: software abstraction layers are becoming strategically valuable in robotics.
As robotics hardware becomes more commoditized over time, software environments that simplify deployment, interoperability, simulation, and AI integration may become increasingly important competitive assets.
Why large corporations now embrace open-source robotics
A decade ago, many industrial automation companies viewed open-source software cautiously.
Today, attitudes have shifted dramatically.
Modern robotics systems are simply too complex for most organizations to develop entirely in isolation.
Autonomous systems now require:
- AI models
- simulation frameworks
- perception systems
- edge computing
- cloud infrastructure
- real-time control systems
- digital twin environments
The scale of the engineering challenge increasingly favors collaborative ecosystems.
Large corporations now contribute to open-source robotics projects for several reasons:
- accelerating ecosystem growth
- attracting developer talent
- influencing technical standards
- reducing duplication of effort
- accelerating adoption of their hardware platforms
This shift mirrors earlier transformations in cloud computing and AI infrastructure.
Even highly competitive companies increasingly recognize that shared foundational infrastructure can expand the total market faster than isolated proprietary development.
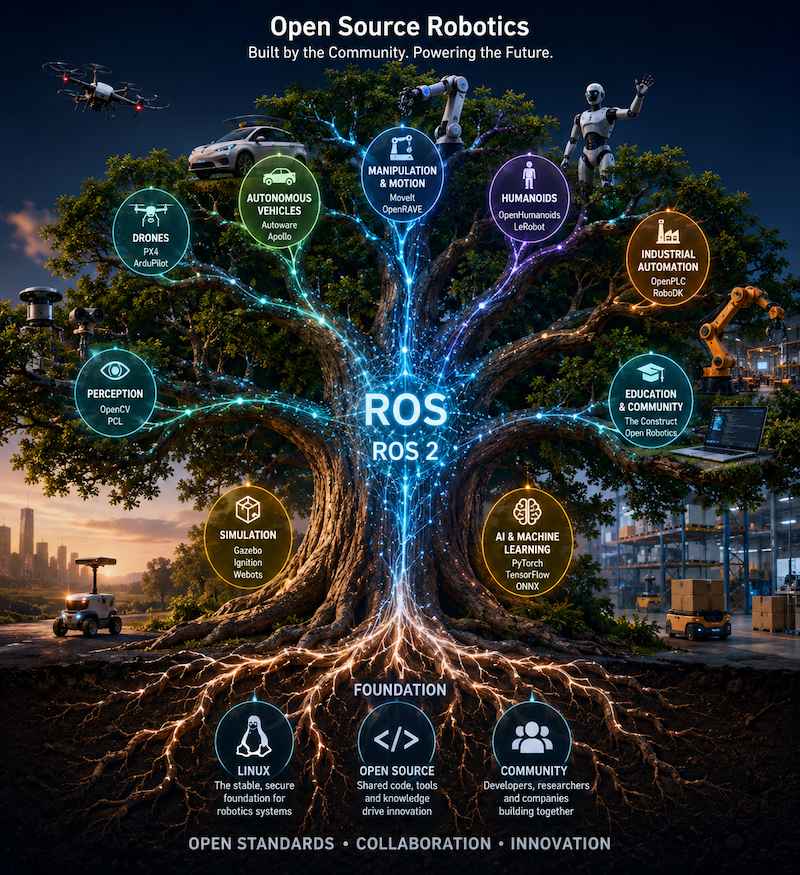
Linux, ROS and the rise of the modular robotics stack
ROS may be the most recognizable open-source robotics platform, but Linux is arguably the true foundation of modern robotics software.
Increasingly, robots are no longer built as isolated systems – they are assembled from layers of collaborative open-source technologies covering everything from operating systems and simulation to AI, computer vision, and autonomous control.
The result is a modular robotics stack that is accelerating innovation across the industry while dramatically lowering development costs for startups, researchers, and industrial companies alike.
| Layer | Examples | Role in robotics |
|---|---|---|
| Operating systems | Linux, Ubuntu | Provides the core computing foundation for many robots and development environments. |
| Robotics middleware | ROS, ROS 2 | Enables communication between robot components, sensors, actuators and software modules. |
| Simulation | Gazebo, Webots, Isaac Sim | Allows developers to test robots virtually before deploying them in the real world. |
| Computer vision | OpenCV | Supports perception tasks such as object detection, tracking, inspection and navigation. |
| AI frameworks | PyTorch, TensorFlow | Provides machine learning infrastructure for perception, planning and robot learning. |
| Drone autonomy | PX4, ArduPilot | Enables autonomous flight control, mission planning and unmanned aerial systems development. |
| Autonomous driving | Autoware, Apollo | Provides open software stacks for perception, localization, planning and vehicle control. |
| Industrial automation | OpenPLC, RoboDK | Helps connect robotics software with factory automation, offline programming and industrial control. |
| Robot learning | LeRobot, Open X-Embodiment | Supports data-driven robot training, imitation learning and embodied AI research. |
| 3D visualization and worlds | RViz, Blender, Unity, Unreal Engine | Provides visualization, synthetic environments, digital twins and training worlds for robotics and AI. |
The next phase: Physical AI and trillion-dollar ecosystems
The next decade may represent the largest transformation in robotics history.
The convergence of AI, simulation, robotics, cloud infrastructure, and synthetic data generation is creating what many investors now describe as “physical AI” – intelligent systems capable of interacting autonomously with the physical world.
This is where the implications become particularly significant for both engineers and investors.
The robotics industry is no longer merely selling machines.
Increasingly, companies are building:
- software ecosystems
- AI training environments
- simulation worlds
- autonomous development platforms
- robotics operating layers
The scale of capital now entering the sector is unprecedented.
Technology giants, sovereign wealth funds, industrial manufacturers, and venture capital firms are collectively investing tens of billions of dollars into humanoid robotics, warehouse automation, autonomous vehicles, defense robotics, and AI infrastructure.
The likely winners may not necessarily be the companies building the cheapest robot hardware.
Instead, some of the most strategically valuable firms could be those controlling:
- development ecosystems
- simulation infrastructure
- AI training data
- robotics operating platforms
- interoperability layers
This partly explains the growing importance of companies such as Intrinsic and the continued strategic relevance of ROS-based ecosystems.
It also explains why early pioneers such as The Construct and RoboDK remain historically important.
These companies emerged during a period when robotics attracted far less attention and investment than it does today. They survived before robotics became fashionable, before “physical AI” became a buzzword, and before investors fully appreciated the scale of the coming automation economy.
In hindsight, they were early indicators of a much larger industrial transition.
From traditional robotics to Physical AI
The robotics industry is beginning to transition from rigid, pre-programmed systems toward more adaptive AI-driven machines capable of learning from data, simulation, and real-world experience.
While traditional robotics relied heavily on deterministic engineering and manual programming, the emerging “Physical AI” era is increasingly shaped by foundation models, neural policies, and natural-language interaction.
| Traditional robotics era | Physical AI era |
|---|---|
| ROS navigation | Foundation AI models |
| Hand-coded behaviors | Learned behaviors |
| Deterministic systems | Probabilistic systems |
| Industrial control logic | Neural policies |
| CAD programming | Natural-language instruction |
Open collaboration may define the future of robotics
The robotics industry still faces enormous challenges.
Commercial deployment remains difficult. Safety, reliability, regulation, cybersecurity, and real-world complexity continue to slow adoption.
Yet one trend now appears increasingly clear: collaborative ecosystems are accelerating robotics development far faster than isolated proprietary approaches ever could.
The future robotics leaders may therefore look less like traditional industrial machinery vendors and more like platform companies that enable vast developer communities.
Just as open-source software transformed computing, collaborative robotics ecosystems may ultimately determine how quickly intelligent machines become part of everyday industrial and commercial life.
And if current investment trends continue, the robotics industry of the 2030s may be dramatically larger – and more software-centric – than even many industry veterans currently expect.
