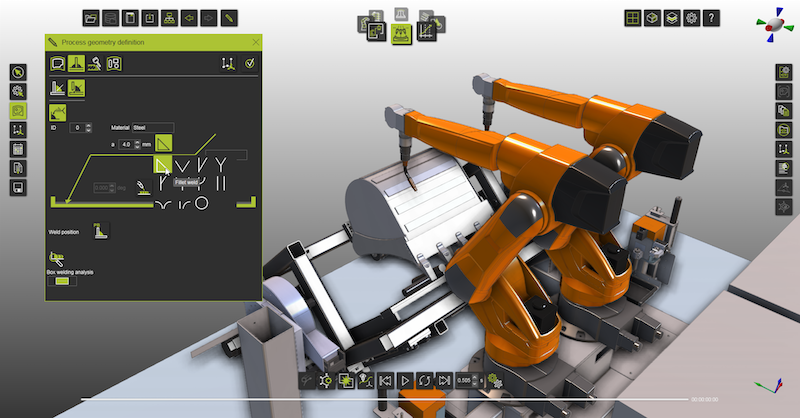
CENIT’s new FASTSUITE E2 release 2023.2 features 28 new functions and enhancements as well as three major highlights: Automated AI-based path optimization, automated seam searches plus efficient planning of welding operations via the Weld Cockpit.
Together, these features make FASTSUITE E2 a key tool for process optimization and cost effectiveness in robot welding applications, according to the company.
Release 2023.2 of the 3D simulation software FASTSUITE E2 is “the next big step” in CENIT’s approach to promoting sustainable digitalization in industrial manufacturing. [Read more…] about CENIT paves the way to autonomous offline programming