Nvidia and USC researchers have demonstrated an innovative approach to Autonomous Robotic Cutting in new work nominated for a Best Paper Award at the Robotics Science & Systems Conference last month. (See video and images below.)
Robotic cutting of soft materials is critical for applications such as food processing, household automation, and surgical manipulation. As in other areas of robotics, simulators can facilitate controller verification, policy learning, and dataset generation. Moreover, differentiable simulators can enable gradient-based optimization, which is invaluable for calibrating simulation parameters and optimizing controllers.
In their work nominated for a Best Paper Award at RSS 2021, Nvidia researchers present DiSECt: the first differentiable simulator for cutting soft materials. The simulator augments the finite element method (FEM) with a continuous contact model based on signed distance fields (SDF), as well as a continuous damage model that inserts springs on opposite sides of the cutting plane and allows them to weaken until zero stiffness, enabling crack formation.
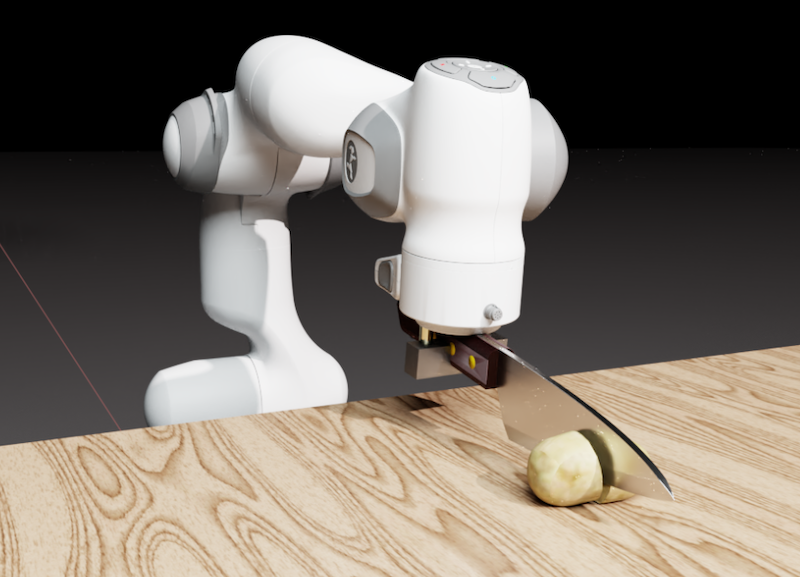
Robotics researchers from Nvidia and University of Southern California presented their work at the 2021 Robotics: Science and Systems (RSS) conference called DiSECt, the first differentiable simulator for robotic cutting. The simulator accurately predicts the forces acting on a knife as it presses and slices through natural soft materials, such as fruits and vegetables.
Robots that are intelligent, adaptive and generalize cutting behavior with either a kitchen butter knife, or a surgical resection remains a difficult problem for researchers.

As it turns out, the process of cutting with feedback requires adaptation to stiffness of the objects, applied force during the cut, and often a sawing motion to cut through. To achieve this, researchers use a family of techniques which leverage feedback to guide the controller adaptation.
However, fluid controller adaptation requires very careful parameter tuning for each instance of the same problem. While these techniques are successful in industrial settings, no two cucumbers (or tomatoes) are the same, hence rendering these family of algorithms ineffective in a more generic setting.
In contrast, recent focus in research has been in building differentiable algorithms for control problems, which in simpler terms means that the sensitivity of output with respect to input can be evaluated without excessive sampling. Efficient solutions for control problems are achievable when the simulated dynamics is differentiable (1,2,3), but the process of simulating cutting has not been differentiable so far.
Differentiable simulation for cutting poses a challenge, since naturally cutting is a discontinuous process where crack formation and fracture propagation occur that prohibit the calculation of gradients. We tackle this problem by proposing a novel way of simulating cutting that represents the process of crack propagation and damage mechanics in a continuous manner.
DiSECt implements the commonly used Finite Element Method (FEM) to simulate deformable materials, such as foodstuffs. The object to be cut is represented by a 3D mesh which consists of tetrahedral elements. Along the cutting surface we slice the mesh following the Virtual Node Algorithm.
This algorithm duplicates the mesh elements that intersect the cutting surface, and adds additional, so-called “virtual” vertices on the edges where these elements are cut. The virtual nodes add extra degrees of freedom to accurately simulate the contact dynamics of the knife when it presses and slices through the mesh.
Next, DiSECt inserts springs connecting the virtual nodes on either side of the cutting surface. These cutting springs allow us to simulate damage mechanics and crack propagation in a continuous manner, by weakening them in proportion to the contact force the knife exerts on the mesh.
This continuous treatment allows us to differentiate through the dynamics in order to compute gradients for the parameters defining the properties of the material or the trajectory of the knife. For example, given the gradients for the vertical and sideways velocity of the knife, we can efficiently determine an energy-minimizing yet fast cutting motion through gradient-based optimization.
Research notes
Video
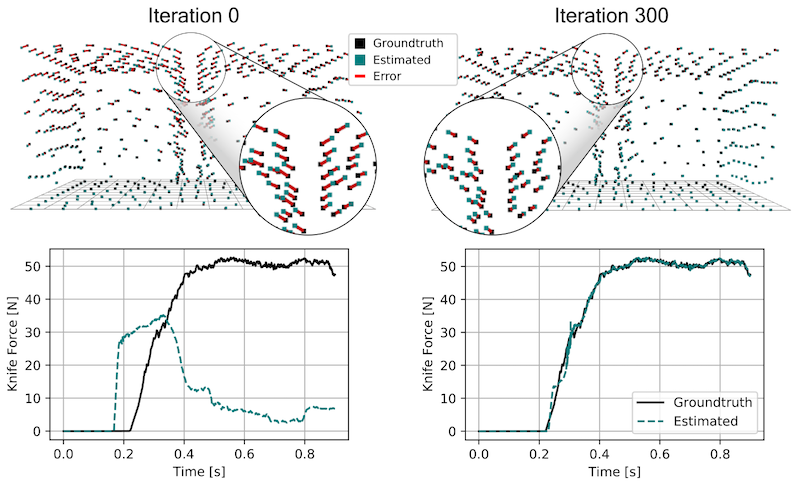
Deformable objects are simulated via the Finite Element Method (FEM). To simulate crack propagation and damage, we insert springs (shown in cyan) between the cut elements of the mesh which are weakened as the knife exerts contact forces.
We leverage reverse-mode automatic differentiation to efficiently compute gradients for hundreds of simulation parameters. Our simulator uses source code transformation which automatically generates efficient CUDA kernels for the forward and backward passes of all our simulation routines, such as the FEM or contact model.
Such an approach allows us to implement complex simulation routines which are parallelized on the GPU, while the gradients of the inputs with respect to the outputs of such routines are automatically derived from analyzing the abstract syntax tree (AST) of the simulation code.
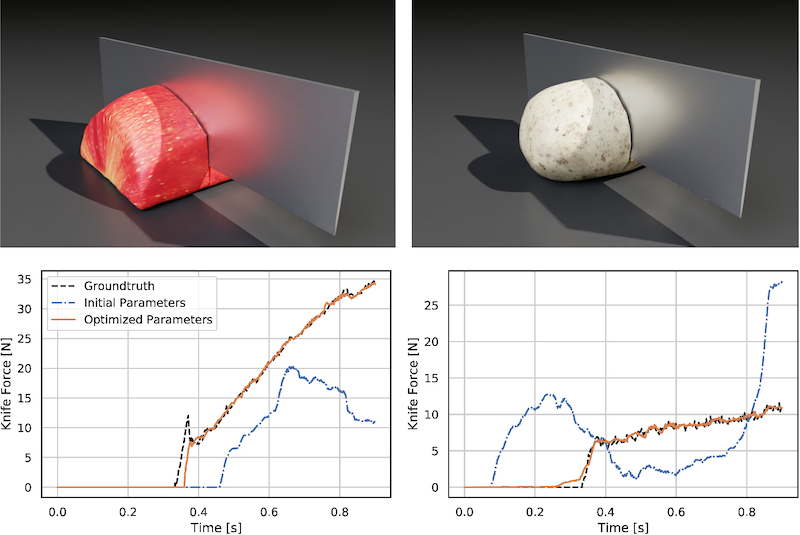
Through gradient-based optimization algorithms, we can automatically tune the simulation parameters to achieve a close match between the simulator and real-world measurements. In one of our experiments, we leverage an existing dataset of knife force profiles measured by a real-world robot while cutting various foodstuffs.
We set up our simulator with the corresponding mesh and its material properties, and optimize the remaining parameters to reduce the discrepancy between the simulated and the real knife force profile.
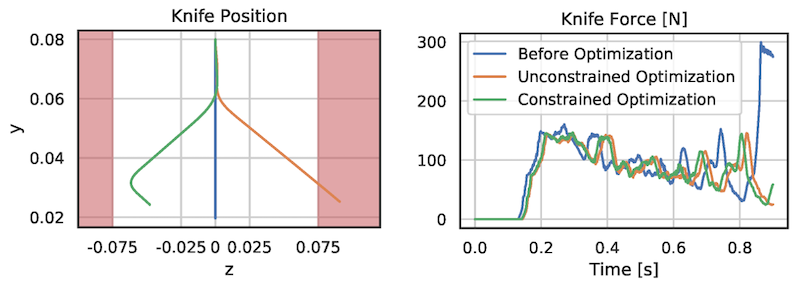
Within 150 gradient evaluations, our simulator closely predicts the knife force profile, as we demonstrate on the examples of cutting an actual apple and a potato.
As shown in the figure, the initial parameter guess yielded a force profile that was far from the real observation, and our approach automatically found an accurate fit. We present further results in our accompanying paper that demonstrate that the found parameters generalize to different conditions, such as the downward velocity of the knife or the length of the reference trajectory window.
We optimize this trajectory with the objective to minimize the mean force on the knife and penalize the time it takes to cut the object. Studies have shown that humans perform sawing motions when cutting biomaterials in order to reduce the required force. Such behavior emerges from our optimization as well.