
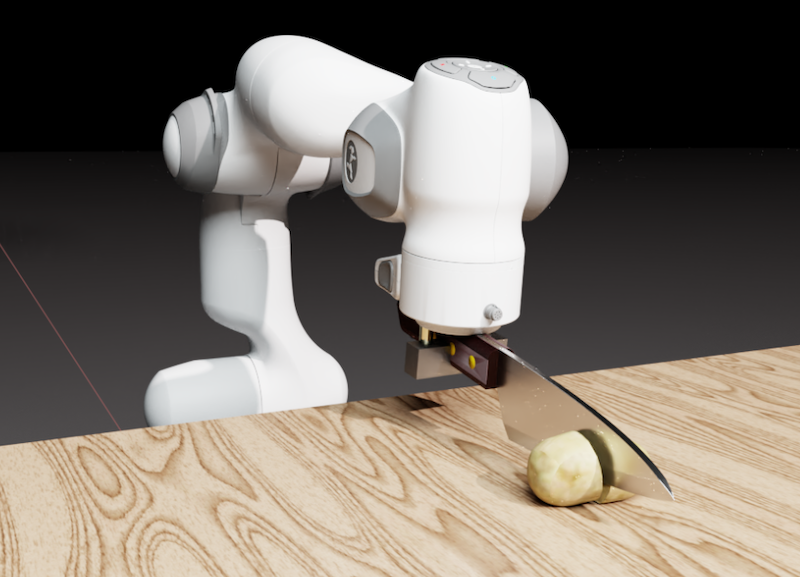
Nvidia and USC researchers have demonstrated an innovative approach to Autonomous Robotic Cutting in new work nominated for a Best Paper Award at the Robotics Science & Systems Conference last month. (See video and images below.)
Robotic cutting of soft materials is critical for applications such as food processing, household automation, and surgical manipulation. As in other areas of robotics, simulators can facilitate controller verification, policy learning, and dataset generation. Moreover, differentiable simulators can enable gradient-based optimization, which is invaluable for calibrating simulation parameters and optimizing controllers.
In their work nominated for a Best Paper Award at RSS 2021, Nvidia researchers present DiSECt: the first differentiable simulator for cutting soft materials. The simulator augments the finite element method (FEM) with a continuous contact model based on signed distance fields (SDF), as well as a continuous damage model that inserts springs on opposite sides of the cutting plane and allows them to weaken until zero stiffness, enabling crack formation. [Read more…] about Nvidia and USC researchers demonstrate autonomous robotic cutting

