
Engineers at Columbia university have invented a robotic trunk-support-trainer to retrain patients with spinal cord injury to sit more stably and gain an expanded active sitting workspace. (See video below.)
Spinal cord injuries (SCI) can cause devastating damage, including loss of mobility and sensation. Every year, there are an estimated 17,000 new SCIs in the US alone, a rate higher than in most regions of the world.
In addition, the rate of SCIs in people 65 years or older is expected to rise in the US, from 13 percent in 2010 to 16.1 percent by 2020.
Data also shows a high survival rate for these patients, who need to function in everyday life but find sitting to be a major challenge.
A Columbia Engineering team has invented a robotic device – the Trunk-Support Trainer (TruST) – that can be used to assist and train people with SCIs to sit more stably by improving their trunk control, and gain an expanded active sitting workspace without falling over or using their hands to balance.
The study, published today in Spinal Cord Series and Cases, is the first to measure and define the sitting workspace of patients with SCI based on their active trunk control.
Sunil Agrawal, the project’s PI and professor of mechanical engineering and of rehabilitation and regenerative medicine, says: “We designed TruST for people with SCIs who are typically wheelchair users.
“We found that TruST not only prevents patients from falling, but also maximizes trunk movements beyond patients’ postural control, or balance limits.”
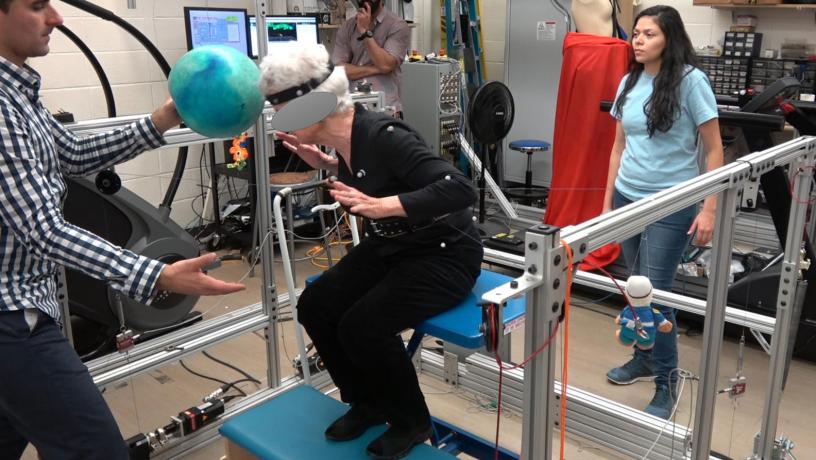
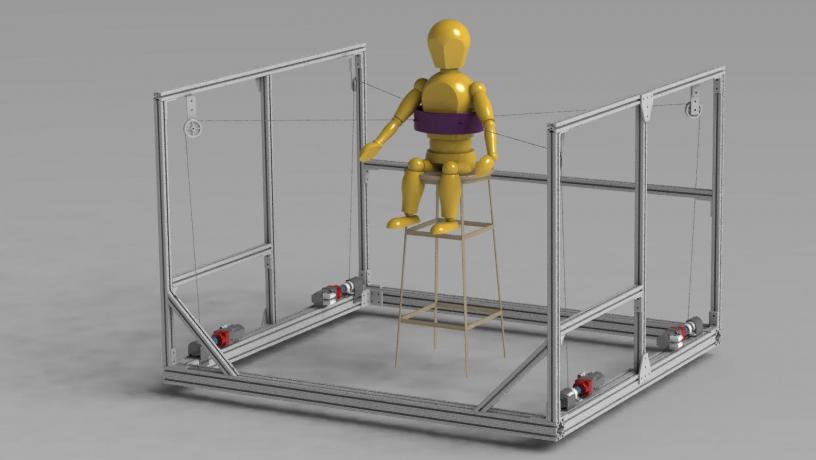
TruST is a motorized-cable driven belt placed on the user’s torso to determine the postural control limits and sitting workspace area in people with SCI. It delivers forces on the torso when the user performs upper body movements beyond the postural stability limits while sitting.
The five subjects with SCI who participated in the pilot study were examined with the Postural Star-Sitting Test, a customized postural test that required them to follow a ball with their head and move their trunk as far as possible, without using their hands.
The test was repeated in eight directions, and the researchers used the results to compute the sitting workspace of each individual.
The team then tailored the TruST for each subject to apply personalized assistive force fields on the torso while the subjects performed the same movements again.
With the TruST, the subjects were able to reach further during the trunk excursions in all eight directions and significantly expand the sitting workspace around their bodies, on an average of about 25 percent more.
Victor Santamaria, a physical therapist, postdoctoral researcher in Agrawal’s Robotics and Rehabilitation Laboratory, and first author of the paper, says: “The capacity of TruST to deliver continuous force-feedback personalized for the user’s postural limits opens new frontiers to implement motor learning-based paradigms to retrain functional sitting in people with SCI.
“We think TruST is a very promising SCI rehab tool.”
Agrawal’s team is now exploring the use of TruST within a training paradigm to improve the trunk control of adults and children with spinal cord injury.
Agrawal says: “The robotic platform will be used to train participants with SCI by challenging them to move their trunk over a larger workspace, with TruST providing assist-as-needed force fields to safely bring the subjects back to their neutral sitting posture.
“This force field will be adjusted to the needs of the participants over time as they improve their workspace and posture control.”
