
Bota Systems, a pioneer in multi-axis force torque sensors, has launched the SensONE T5, a high sensitivity version of its SensONE sensor.
The SensONE T5 provides an exceptional sensitivity level of just 0.05 N / 0.002 Nm, which is three to five times higher than on the current SensONE sensor.
The SensONE T5 is, therefore, perfectly suited for implementation on collaborative robots (cobots) with small payloads of up to 5 kg.
It offers optimal sensitivity for small cobots and it is one of the most compact and lightweight sensors with fully integrated electronics now available on the market.
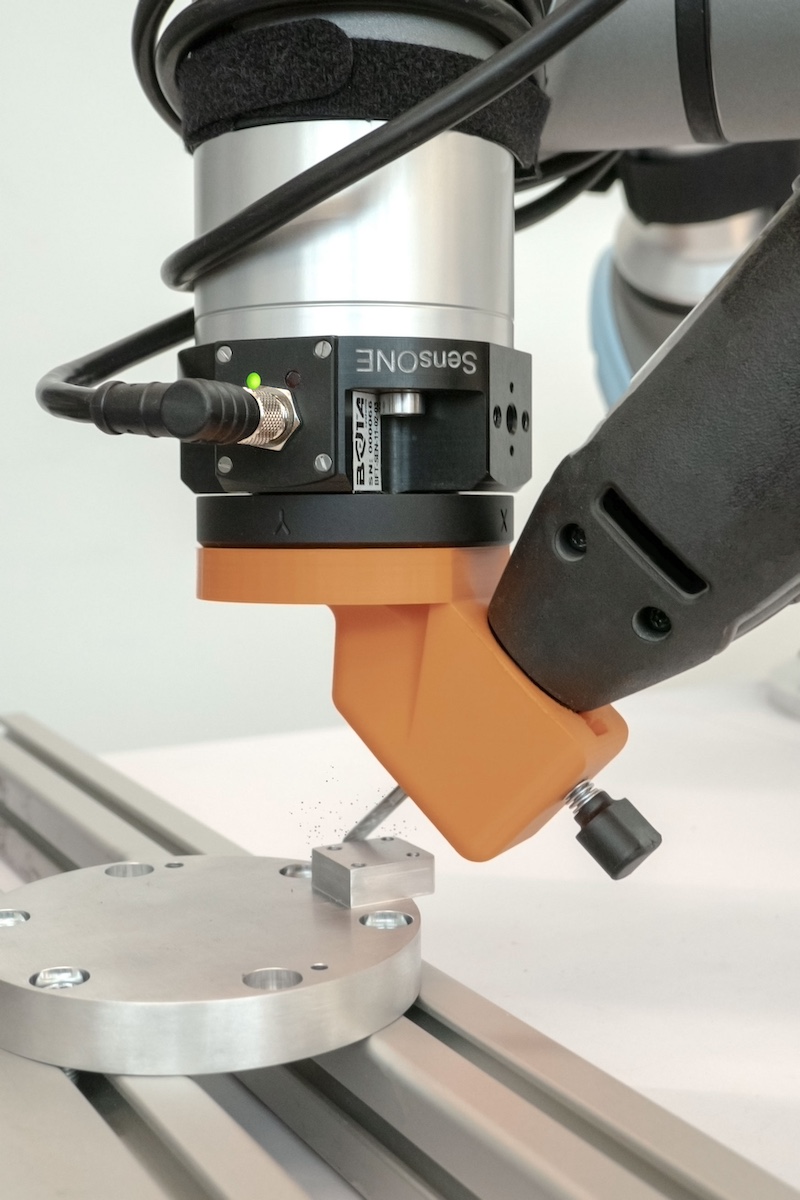
The SensONE T5 is a 6-axis force torque sensor designed for the most challenging applications. It comes in a compact package that is dustproof and water-resistant; it is easy to integrate into robotic arms and requires no mounting adapter.
From March 25th to 28th, the SensONE T5 will be on display at Global Industrie (Hall 5, Booth 5G169) in Paris, France, where Bota Systems will be showcasing its entire sensor range, accompanied by two live demos.
Ilias Patsiaouras, CTO and Co-Founder of Bota Systems AG, says: “This new force torque sensor’s excellent sensitivity opens up exciting new possibilities for collaborative small payload robots, which are used for performing highly sensitive applications.
“The SensONE T5 will find its niche in end of line quality testing of small parts, such as buttons in electronics, as well as precision assembly of highly detailed, delicate tasks, such as the routing and installation of electric cables into cabinets.”
Temperature drift is negligible, and the new sensor provides accuracy exceeding 2.0% with a sampling rate of up to 2000 Hz.
The SensONE T5 is available in two communications options, serial USB/RS422 and EtherCAT, and comes with smooth TwinCAT, URcap, ROS, LabVIEW and MATLAB® software integration.
A robotic force torque sensor is a device that simultaneously measures force and torque that is applied to a surface. The measured output signals are used for real-time feedback control, thus enabling robots to perform challenging human-machine interaction tasks.
The sensor that is most commonly used for these types of robotic applications is a complete six-axis force torque sensor, which measures the force and torque on all three axes.
