
Kuka has expanded its portfolio of mobile platforms with the unveiling of a new autonomous mobile robot for intralogistics.
Describing it as a “compact powerhouse meets the highest safety requirements”, Kuka says the new generation of the KMP 600-S diffDrive is “fast – up to two meters per second – and equally safe, thanks to laser scanners and 3D object detection”.
Mobile solutions must meet extremely high standards for industrial use, says the company. The Kuka KMP 600-S diffDrive mobile platform provides a new automated guided vehicle system with high-speed support for production intralogistics and a payload of up to 600 kg.
At the same time, Kuka says the KMP 600-S diffDrive is “ideally equipped for the tough everyday environment of industrial production”.
Its IP 54 design always enables it to work reliably even under adverse conditions – including water spray and dust, adds Kuka.
Kuka says all its mobile platforms “guarantee employees maximum freedom of movement without the need for safety fencing, with the KMP 600-S diffDrive being “no exception”.
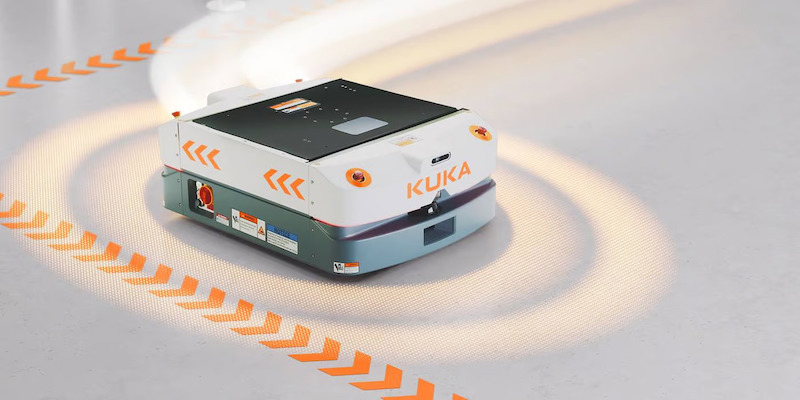
Laser scanners mounted at the front and rear of the machine provide maximum safety and allow for high speeds in all directions of travel when cycle times require it.
Jakob Brandl, portfolio manager at Kuka, says: “Safety is a central concern for us.
“That’s why the KMP 600-S diffDrive uses eight safety zones at both the front and rear – customizable for vehicle speeds and specific applications.”
Add 3D object detection to expand the KMP 600-S diffDrive so it can detect obstacles from 50 mm to 2.10 m above the ground. Its possible to link the KMP 600-S diffDrive to a wide variety of workstations for precisely the right load-handling options.
For example, it acts as a top-load AGV (automated guided vehicle) and can lift pallets or cartons up to 60 mm via its integrated lifting device.
Start up the KMP 600-S diffDrive via a manual controller and program applications in Java. With an operating time of around eight hours, the KMP 600-S diffDrive can recharge in two hours.
Kuka.NavigationSolution monitors an entire fleet: it detects battery charge levels and identifies which vehicles are connected to the WLAN.
After initial environment teaching through the SLAM algorithm, the software solution takes over localization in space (on the vehicle itself) as well as vehicle coordination (on a central computer).
The fleet manager uses parameters such as distance and speed to determine the best route on the network of paths – avoiding all collisions.
