
Industrial technology and automation company Festo has unveiled what it describes as “the first pneumatic collaborative robot”, saying it marks a “new era in human-robot collaboration”
What if there was a robot that was easy to operate, did not require a safety fence and was also attractively priced? That would introduce a whole new era in human-robot collaboration. This new era is now dawning – with the world’s first pneumatic robot from Festo.
Hardly any industrial market segment will grow as rapidly over the next few years as human-robot collaboration. Cobots relieve employees of particularly strenuous or monotonous tasks, giving them new levels of freedom and making their work easier and healthier.
And no other technology has such a sensitive and flexible approach to human-robot collaboration as pneumatics.
The Festo Cobot owes many of its advantages, such as its sensitivity, weight and value for money, to the benefits of pneumatics.

The direct drives in the articulated joints are very cost-effective and particularly lightweight because, unlike electric solutions, no heavy gear units or expensive force-torque sensors are required.
The “world’s first pneumatic cobot” – according to Festo – is the result of the exceptional expertise in controlled pneumatics from Festo.
The Festo Cobot even makes using cobots cost-effective for small and medium-sized companies, which often rely on manual work processes. Its flexible application options mean that small batch sizes or work steps can now be processed automatically.
Thanks to its uniquely intuitive and simple commissioning and programming, it is quick and easy to get to grips with so extensive training is not required.
The pneumatic Festo Cobot will be cheaper than electric cobots in the same class. It will provide excellent value for money in its main application area of small parts handling with payloads of up to 3 kg.
Dr Frank Melzer, member of the management board for product and technology management at Festo, says: “When it goes on sale in 2023, the Festo Cobot will set new standards in human-robot collaboration with its ease of use.”
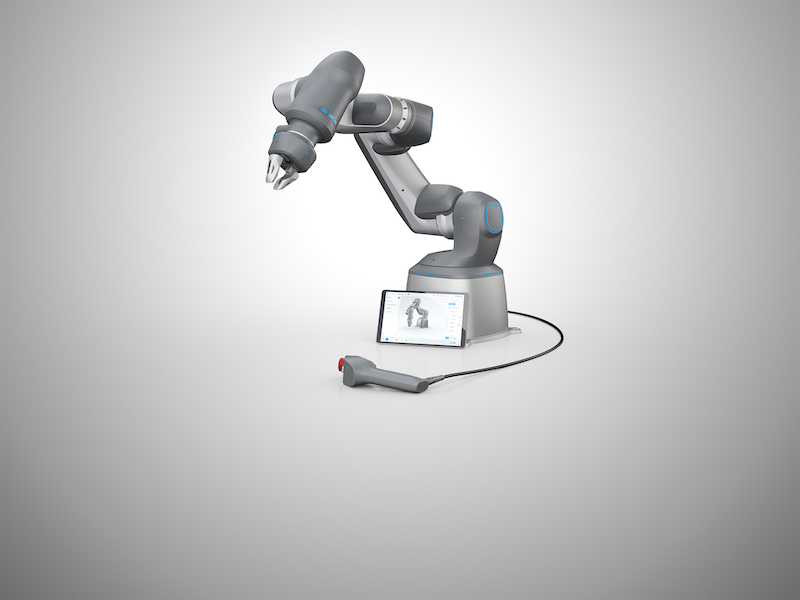
The Festo Cobot consists of the hardware itself, a handheld module and the Robotic Suite – software for intuitive commissioning and programming.
This package makes it possible to commission and program the Cobot in less than an hour. Prior knowledge of robotics is not required either, because the self-explanatory Robotic Suite software contains clearly visualised and standardised function blocks.
Pneumatic drives enable the robot arm to be guided by hand easily and without any resistance so that waypoints or paths can be taught quickly and precisely.
For small and medium-sized companies in particular, cobots are only attractive if they can adapt quickly to take on a new task and are not just permanently used for the same purpose.
The Festo Cobot meets this requirement as it doesn’t require an additional control cabinet (which can be difficult to connect and cumbersome).
The compact controller that is integrated in the Cobot’s own base makes it particularly flexible. Simple connections also allow it to be used ad hoc without long changeover times. Common bus standards enable fast connection to higher-order controllers. It also requires less space.
Thanks to state-of-the-art, lightweight construction methods, the Festo Cobot weighs in at well under 20 kg so that it can be deployed quickly and flexibly at other locations.
With a length of 670 mm, the Festo Cobot is just like a human arm and has the right reach for it to be perceived as a helping third hand when working with a member of staff. It moves – like a real colleague – within a manageable radius.
Thanks to the flexibility of the pneumatic drives, the cobot acts sensitively – at a speed appropriate to the situation and with fluid, harmonious movements. It is as soft to the touch as human contact.
The cobot’s pneumatic direct drives and its light weight reduce its contact energy.
Christian Tarragona, head of robotics at Festo, says: “Thanks to precise pressure regulators in the articulated joints, the robot recognises when it is being touched and responds with appropriate safety functions.”
