
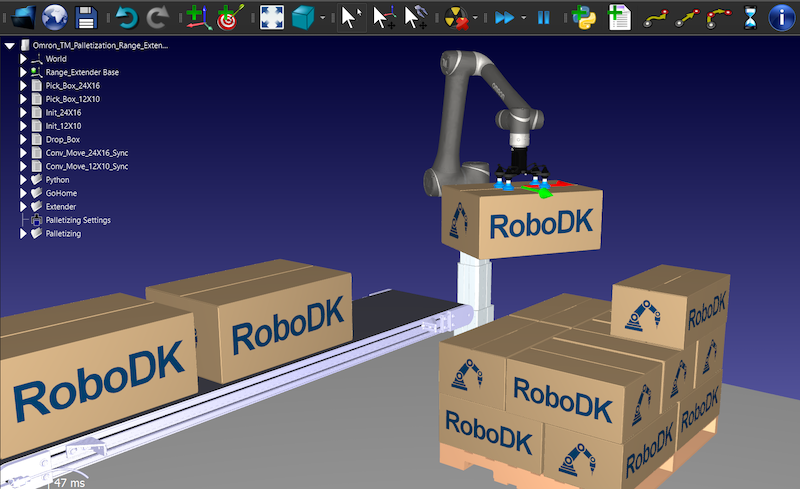
Robot software company RoboDK has released a new palletizing plugin for intuitive programming of palletizing applications, compatible with almost any robot brand. It accelerates this normally tedious programming task and improves deployment efficiency.
Palletizing is an increasingly common application for robotic automation. For human workers, lifting containers onto pallets is dull and increases the risk of musculoskeletal injuries due to its repetitive nature.
Robots have long provided an alternative to manual palletizing. However, programming the task has traditionally been tedious.
Flore Cachera, head of marketing at RoboDK, says: “A lot of customers have asked for this feature. All the hard work of palletizing programming is now done by RoboDK. The user only needs to set the position of the pallet.”
The new RoboDK plugin can be used immediately with the hundreds of robot models already supported by the software.
Why programming robot palletizing is a dull job
Robots are often employed to relieve workers from dull and repetitive jobs. However, the conventional options for robot programming make deploying palletizing applications almost dull as palletizing itself.
For example, a pallet holding 800 boxes would require a robot program with at least 1600 points in it. Creating this program would be repetitive and time-consuming. Users would need to manually teach each box position to the robot or hard code a script to do it for them.
Albert Nubiola, CEO of RoboDK, explains that the robotics market has traditionally been unbalanced for palletizing applications. He says: “Some robot controllers offer built-in user interfaces to quickly setup palletizing and depalletizing projects. Unfortunately, this is not available for all robots or controllers.
“RoboDK’s palletizing plugin allows you to use any robot for palletizing.”
As well as speeding up the programming step, another benefit of the new plugin is that users can program the task offline. This eliminates the production downtime caused by shop floor robot programming.
How the new palletizing plugin works
The palletizing plugin is now available for users of RoboDK. It can be accessed by downloading the latest update.
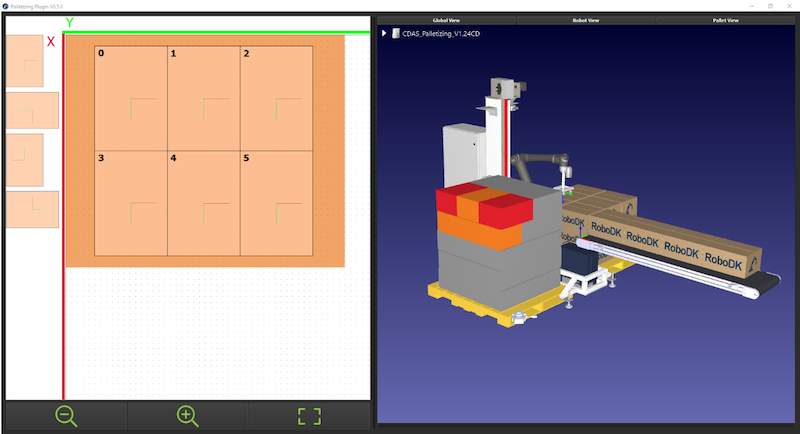
Jeremy Brouillard, product manager at RoboDK, explains how it works: “Our goal was to create one of our most user-friendly features to date. To achieve it, we relied on a basic but efficient 2D graphic. You first create your pallet patterns by dragging your boxes on the screen. You then stack your unique box patterns to form your pallet layers. The only thing left to do is simulate and generate the program.”
To use the plugin, users simply open a menu and enter their pallet settings step by step. They can then easily drag and drop each box to where it should be on each layer of the pallet. A 3D visualization shows a simulation in real-time and the user can go back and adapt the settings, so the setup perfectly suits all their requirements.
Brouillard adds: “Anyone using a robot to simulate or program palletizing applications should take a look at this feature. This one is a real time saver.”
Future plans
Palletizing is just one of several high-impact applications that RoboDK is working to support, though they don’t want to reveal too much yet.
Cachera explains that these additions are driven by user feedback. She says: “We don’t create robot simulation software for ourselves, we create it for our users. We will continue to listen to them and offer new features that really fit their needs. Most importantly, we will keep the ‘RoboDK touch’: remaining flexible, easy-to-use, and supporting the largest range of robot arms.”
