
Scientists at Zhejiang University in China have developed a soft robot which has been able to navigate the Mariana Trench, the deepest part of the Earth.
The research team led by Professor LI Tiefeng from the Center for X-Mechanics at the Zhejiang University School of Aeronautics and Astronautics and Zhejiang Lab conducted inter-disciplinary research with its partners and pioneered in proposing the principle of pressure adaptation in mechatronic systems, and their findings were reported in the journal Nature.
Typically, at such depths in the oceans, a vessel without a pressure-resilient “armor” would be “destroyed by the overwhelmingly hydrostatic pressure”.
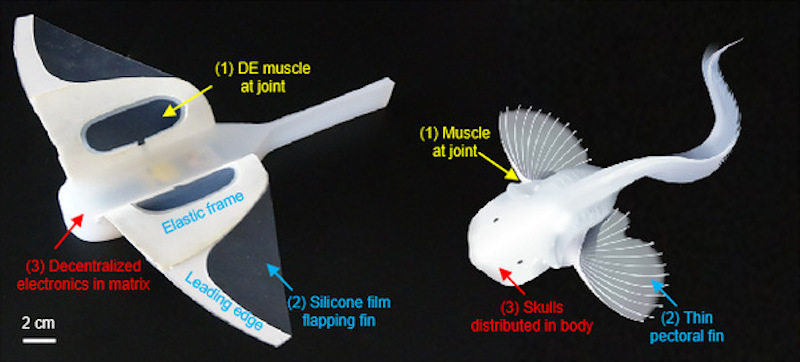
But the soft robot developed by LI Guorui (the first author) et al exhibits “remarkable swimming performance” due to its soft actuator, including dielectric elastomers (DEs) and flapping fins, according to the paper in Nature.
The electronics, including a battery and a microcontrol unit (MCU), are encapsulated in a silicone soft body. To enhance pressure resilience, researchers mitigated the shear stress by using a decentralized design in which the components are wire-connected with or separated onto several smaller printed circuit boards.
Certain types of snailfish were used as inspiration for the robot. This fish is marked by a distributed skull and flapping pectoral fins, which enable it to live in high-pressure environments.
“This research opens up a new channel for deep-sea explorations and environmental observations, and is expected to improve the application capability of deep-sea intelligent devices and robots in multiple tasks and complex scenarios,” said LI Tiefeng.
