
During the swarming of birds or fish, each entity coordinates its location relative to the others, so that the swarm moves as one larger, coherent unit.
Fireflies on the other hand coordinate their temporal behavior: within a group, they eventually all flash on and off at the same time and thus act as synchronized oscillators.
Few entities, however, coordinate both their spatial movements and inherent time clocks; the limited examples are termed “swarmalators”, which simultaneously swarm in space and oscillate in time.
Japanese tree frogs are exemplar swarmalators: each frog changes both its location and rate of croaking relative to all the other frogs in a group.
Moreover, the frogs change shape when they croak: the air sac below their mouth inflates and deflates to make the sound. This coordinated behavior plays an important role during mating and hence, is vital to the frogs’ survival.
In the synthetic realm there are hardly any materials systems where individual units simultaneously synchronize their spatial assembly, temporal oscillations and morphological changes.
Such highly self-organizing materials are important for creating self-propelled soft robots that come together and cooperatively alter their form to accomplish a regular, repeated function.
Chemical engineers at the University of Pittsburgh Swanson School of Engineering have now designed a system of self-oscillating flexible materials that display a distinctive mode of dynamic self-organization.
In addition to exhibiting the swarmalator behavior, the component materials mutually adapt their overall shapes as they interact in a fluid-filled chamber. These systems can pave the way for fabricating collaborative, self-regulating soft robotic systems.
The group’s research was published this week in the journal Proceedings of the National Academy of Sciences (DOI: 10.1073/pnas.2022987118). Principal investigator is Anna C. Balazs, Distinguished Professor of Chemical and Petroleum Engineering and the John A. Swanson Chair of Engineering. Lead author is Raj Kumar Manna and co-author is Oleg E. Shklyaev, both post-doctoral associates.
“Self-oscillating materials convert a non-periodic signal into the material’s periodic motion,” Balazs explained.
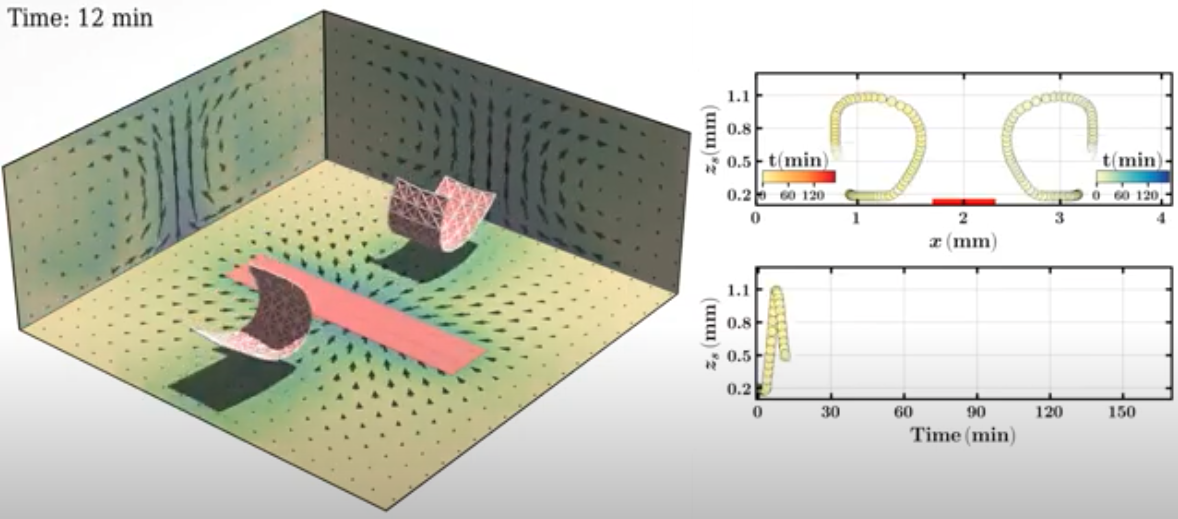
“Using our computer models, we first designed micron and millimeter sized flexible sheets in solution that respond to a non-periodic input of chemical reactants by spontaneously undergoing oscillatory changes in location, motion and shape.
“For example, an initially flat, single sheet morphs into a three-dimensional shape resembling an undulating fish tail, which simultaneously oscillates back and forth across the microchamber.”
The self-oscillations of the flexible sheets are powered by catalytic reactions in a fluidic chamber.
The reactions on the surfaces of the sheet and chamber initiate a complex feedback loop: chemical energy from the reaction is converted into fluid flow, which transports and deforms the flexible sheets.
The structurally evolving sheets in turn affect the motion of the fluid, which continues to deform the sheets.
“What is really intriguing is that when we introduce a second sheet, we uncover novel forms of self-organization between vibrating structures,” Manna adds.
In particular, the two sheets form coupled oscillators that communicate through the fluid to coordinate not only their location and temporal pulsations, but also synchronize their mutual shape changes.
This behavior is analogous to that of the tree frog swarmalators that coordinate their relative spatial location, and time of croaking, which also involves a periodic change in the frog’s shape (with an inflated or deflated throat).
“Complex dynamic behavior is a critical feature of biological systems,” Shklyaev says.
Stuff does not just come together and stop moving. Analogously, these sheets assemble in the proper time and space to form a larger, composite dynamic system. Moreover, this structure is self-regulating and can perform functions that a single sheet alone cannot carry out.”
“For two or more sheets, the collective temporal oscillations and spatial behavior can be controlled by varying the size of the different sheets or the pattern of catalyst coating on the sheet,” says Balazs.
These variations permit control over the relative phase of the oscillations, for example, the oscillators can move in-phase or anti-phase.
“These are very exciting results because the 2D sheets self-morph into 3D objects, which spontaneously translate a non-oscillating signal into “instructions” for forming a larger aggregate whose shape and periodic motion is regulated by each of its moving parts,” she notes.
“Our research could eventually lead to forms of bio-inspired computation – just as coupled oscillators are used to transmit information in electronics – but with self-sustained, self-regulating behavior.”
