
By Rhys Davies, product manager at Canonical, publisher of Ubuntu open-source operating system
The service robotics market is projected to soar from $37 billion worldwide this year to $102.5 billion by 2025, according to ResearchAndMarkets. Every week, it seems, we see some cool new application, like the warehouse automation solution shown in the video below.
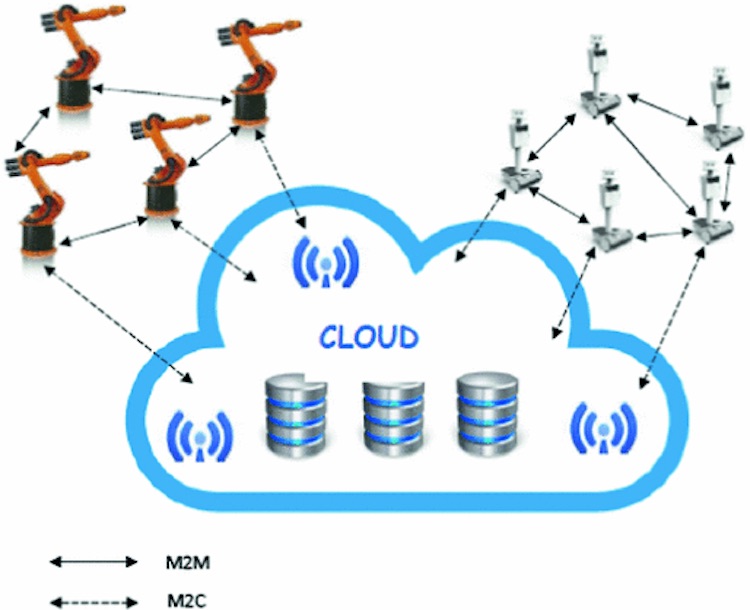
A major reason for robotics’ emergence as a hot technology trend often spoken in the same breath as the Internet of Things (IoT) and artificial intelligence (AI) is the convergence of robotics with the cloud.
Cloud robotics – a term first coined in 2010 by then-Google research scientist James Kuffner – provides vast amounts of processing power and storage resources to expand robot capabilities.
Thanks to cloud robotics, robots can offload compute-intensive tasks, such as image recognition and graphical mapping systems, and download new skills and software updates.
But for the hype around robotics to become reality, the industry must tackle three technical challenges that currently stand in the way of optimal performance as robots increasingly interact with cloud technologies.
Here’s a look at those three hurdles.
1. Speed.
People are used to fast speeds with their email and apps, but speed in the robotics sense is an order higher: real-time processing with zero latency so that, for example, a robotic arm is in the right place at precisely the right time. Some robots need to operate at the speed of brain synapses, and cloud robotics must follow suit.
A growing open-source community around robotics is tackling this challenge, primarily through two projects.
One is ACRN, a two-year-old Linux Foundation project to develop a “big little hypervisor” that can address the unique needs of robots and IoT devices where real-time payloads are essential. ACRN emphasizes low latency and communication responsiveness for resource-constrained hardware.
The second is another Linux Foundation project, Zephyr, that aims to build “a safe, secure and flexible real-time operating system” for the IoT, robots and other space-constrained devices across multiple architectures. The project released its 2.2 version in March.
Although it is worth noting that in a lot of cases, this is overkill. Until the real-time problem gets a solution, implementing its capabilities will prove difficult and unnecessary. There are a lot of workarounds and solutions that cloud robotics does offer if developers can think more outside the box of real-time capabilities.
2. Connectivity
Imagine the trouble that could result if a mission-critical robot, say a surgical robot, suddenly loses its connection to the cloud or network. It’s simply not an option.
Most people can relate to this issue themselves, putting it into a high criticality situation could result in more than just dropping off Netflix for a few minutes.
This issue is continuously being solved in a number of ways. One such solution for the robotics industry is 5G. With 5G’s dramatic latency and connectivity improvements, connectivity and proper communication will become much less of a worry.
Another way to attack the problem is to establish localized robot mini-clouds, or resource sharing clusters, as a fallback so that if the network goes down, robots can keep sharing resources and continue to perform their tasks.
This idea has strong ties already in the cloud world, with things like Kubernetes and Microk8s, and in the robotics world. Swarm robotics uses the same principle and is a very interesting focus of research across the world.
3. Isolation
Isolation comes into play when it isn’t prudent or is simply impossible to connect the robot into a network, for security reasons or because the robot is buried deep underground (for energy exploration, or tunnel mapping, for example).
The solution here actually doesn’t involve cloud robotics at all but rather the other side of the coin, edge computing. Which executes computing tasks at or near the source of the data rather than relying on the cloud.
Addressing the isolation challenge involves simply moving the computational resources to the edge. This could be more powerful hardware, following Moore’s law. Or it could be localized resource sharing using the kind of computational clusters mentioned above.
As the industry continues to develop ways to overcome these three challenges, we can look to the combination of cloud and robotics to continue to transform a range of industries with smarter, more capable robots.
As with so many other things in technology these days, the future of robotics lies in the cloud.
Main image courtesy of Springer.com
