Intel presented a series of innovations in integrated circuits and systems-on-chip at the International Solid-State Circuits Conference (ISSCC), the leading forum on advanced circuit research, in San Francisco in February.
Intel presented 17 scientific papers and accompanying demonstrations that could have an impact on a wide range of applications for the future of technology – including developments in 5G and memory.
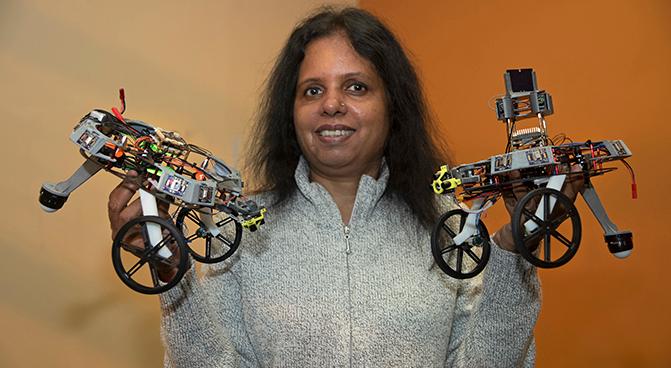
It presented a research paper, Distributed Autonomous and Collaborative Multi-Robot System Featuring a Low-Power Robot SoC in 22nm CMOS for Integrated Battery-Powered Minibots.
In this paper, Intel demonstrated a distributed, autonomous and collaborative multi-robot system featuring integrated, battery-powered, crawling and jumping minibots.
For example, in a search and rescue application, four minibots collaboratively navigate and map an unknown area without a central server or human intervention, detecting obstacles and finding paths around them, avoiding collisions, communicating among themselves, and delivering messages to a base station when a human is detected.
Multi-robot systems, working collectively to accomplish complex missions beyond the capability of a single robot, have the potential to disrupt a wide range of applications ranging from search and rescue missions to precision agriculture and farming.
The multi-bot systems can dramatically speed the time to perform a single task. For example, shortening time and latency for first responders during an emergency.
However, advanced robotics and artificial intelligence have, to date, required large investment and intensive computational power.
The development of these distributed, autonomous and collaborative minibots, which are operated by a system-on-chip that delivers efficiencies orders of magnitude beyond what was previously possible, represents the first step toward enabling the development of energy- and cost-efficient multi-robot systems.
Each minibot platform integrates:
(i) a camera, LIDAR and audio sensors for real-time perception and navigation;
(ii) a low-power custom robot SoC for sensor data fusion, localisation and mapping, multi-robot collaborative intelligent decision-making, object detection and recognition, collision avoidance, path planning, and motion control;
(iii) low-power ultra-wideband (UWB) radio for anchorless dynamic ranging and inter-robot information exchange;
(iv) long-range radio (LoRa) for robot-to-base-station critical message delivery;
(v) battery and PMIC for platform power delivery and management;
(vi) 64MB pseudo-SRAM (PSRAM) and 1GB flash memory; and (vii) actuators for crawling and jumping motions.
