

Robot vision specialist Pickit has unveiled its first gripper. Aimed at the forging and automotive sectors, the end-of-arm-tool has integrated vision and software.
“The bin picking revolution is happening now,” says Pickit. “With matured 3D vision and software, the implementation risks for bin picking revolve around the gripper design. We have integrated gripper, vision, and software to achieve unprecedented reliability. Here’s our new Billet Picker for forging and automotive applications.”
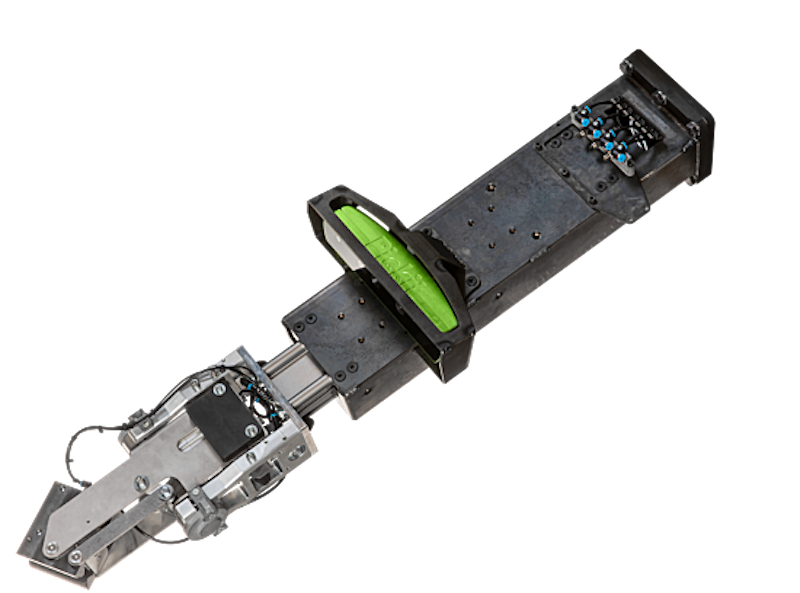
The company’s new product is called the “Billet Picker”, and is a combination of Pickit EOAT + Pickit 3D vision + Pickit software.
The billet picker is an assembled End Of Arm Tooling (EOAT) integrated with the Pickit 3D vision system and billet-specific software for billet handling robotic applications.
“You don’t have to choose between speed, accuracy, flexibility, and cost,” says Pickit. “The Billet picker gives you a steady machine feeding rate, low maintenance automation, and empty bins.”
Forges around the world depend on reliable feeding of their induction ovens. In the past decades, mechanical feeding automation was the only solution this industry could rely on.
However, these mechanical billet feeders are bulky, loud, and expensive to maintain. Due to advancements in robotics and vision, as well as Pickit’s dedicated approach to tackle the bin picking problem in forging, Pickit came up with a solution.
By integrating the gripper and camera, robot cells became easy to install and perform their job.
While this solution is an ideal fit for billet handling applications at forging facilities, it also demonstrates the capability to handle a wide variety of cylindrical parts like tubes, shafts, and CV joints.
The Billet picker gripper builds on the concept of having an adaptable tooltip with a magnet mounted on a rotational axis.
This is a patent-pending technology and key enabling concept for this application.
Next to that, the software knows how flexible the gripper will be and will find the best way to extract the billet without colliding with the side of the bin or other objects.
