AutomationWare prepares for future with new robotic joints
AutomationWare says it is “looking forward” to the rest of 2023 with the new version of its robotic joints (actuators) in J and T versions and UNI EN ISO 9001 certification for the design and production of systems for automation and industrial robotics.
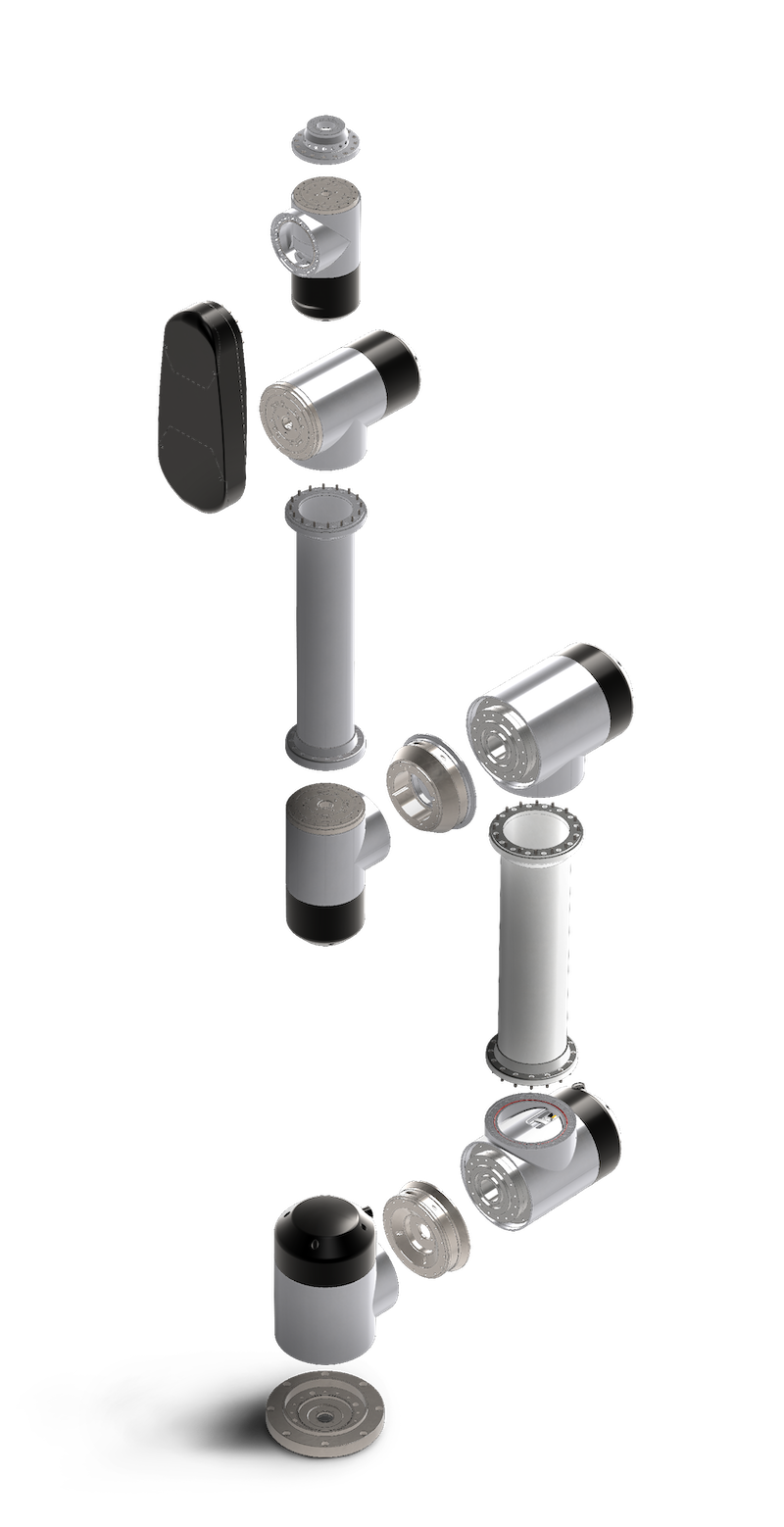
The era of modular and scalable robotics based on AutomationWare’s J&T actuators begins and Robotics becomes Lego
Innovating the world of high-performance actuators.
AutomationWare has chosen a personal approach to the world of robots, producing high-tech actuators, which it uses both to produce robotic solutions itself (especially collaborative arms with special configurations, sizes and payloads) and to meet the demands of customers oriented towards tailor-made, in-house robotic solutions with degrees of freedom necessary for their application.
AutomationWare, with the aim of improving safety, increasing production efficiency and modularity with respect to the application approach, has re-engineered 5 models of robotic joints (Actuators) with highly sophisticated mechatronic technologies.
Thanks to them, customers will be able to build mobile robotic platforms by integrating the joints to model their own piking system, they will be able to build components such as exoskeletons, arms for non-commercial applications, they will be able to use the joints as high torque and extreme precision rotary tables for machinery applications.

The 5 models are different in size and torque performance, allowing anyone to produce modular robotic solutions. The compositions are countless, allowing customisation according to the desired operating area, payload and speed required by the application.
The J-Actuators, thanks to an AW patent, can also be supplied in ‘Naked’ configuration, with no external aluminium alloy frame to be integrated directly by the customer according to their needs.
There are 5 couplings: J17, J20, J25, J32, J40 (LP and HP).
Technical features
The J-Actuators incorporate an EtherCAT motor control board that allows the actuator to be controlled via an industrial bus, equipped with advanced safety systems in case of hazardous situations.
The board also features a control platform to regulate and monitor the performance of the coupling from a PC, adjusting its performance according to the robot shape or application.
Box
- Maximum motion control performance
- High-speed EtherCAT interface (DS402, up to 4kHz)
- >10 TUV certified safety functions (SIL3, Pl-e)
- 2 integrated high-resolution absolute encoders
- Various sensor interfaces
- Meets all relevant requirements (EMC, safety)
- Easy-to-use commissioning and set-up tools
- Optional Safe Motion module enables safe motion functions at SIL3 PL level and on FSoE (FailSafe on EtherCAT), and can be implemented according to ISO/TS 15066
J-Actuators J25, J32 and J40 are equipped with a customised electromagnetic friction brake for the best mechanical integration and low power consumption.
This brake locks the axis during an emergency situation or power failure. This brake system ensures maximum safety even under extreme operating conditions where loads applied to the coupling can reach up to 800 Nm in the J40.
The smaller J- Actuators J17 and J20 incorporate a lightweight mechanical pin-lock system.
Software control
The robotics researcher can programme the joint directly from the Twin Cat motion controllers or the powerful ROS or ROS2 operating system to manage the kinematics directly and in real time.
Robotic joints can be controlled in ROS or ROS2-based environments thanks to the RoboVu software connector, which allows ROS kinematics to control them in real time from kinematics generated with URDF files.
The key is to customise the most suitable robotic configuration for the specific application and easily manage and control it with RoboVu.
This possibility allows customers using J actuators to free themselves from predefined commercial systems with fixed shapes, geometries and payloads.