Health News Think Surgical’s miniature robotic system developed with Sagentia gains FDA clearance August 6, 2023
Health News Think Surgical’s miniature surgical robotic system developed with Sagentia gains FDA clearance July 8, 2023
News Service robots Blendid takes its robotic smoothie kiosks into athletic clubs with the Bay Club April 19, 2023
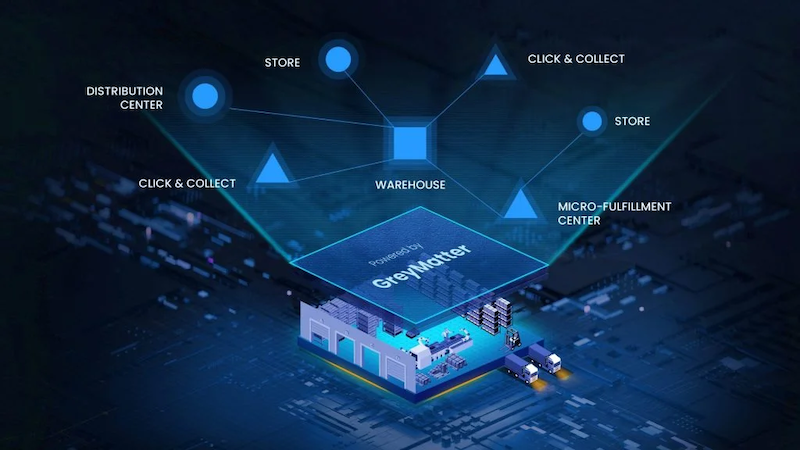
Computing News GreyOrange launches GreyMatter open API to manage variety of robotic systems January 20, 2023
Design Features Open letter: Robotics companies call on policymakers not to weaponize robots November 4, 2022
News Robotics European Commission launches online ‘meeting point’ for robotics community October 13, 2022
Computing News General Motors and Red Hat partner to develop software-defined vehicles August 10, 2022