Toyota and Carmera partner on HD maps for automated vehicles
Toyota Research Institute-Advanced Development, Inc. TRI-AD and Carmera, Inc. are joining forces to conduct a proof of concept on developing camera-based automation of high definition (HD) maps for urban and surface roads.
This is the first step towards making TRI-AD’s open software platform concept, known as Automated Mapping Platform, to support the scalability of highly automated driving, by combining data gathered from vehicles of participating companies to generate HD maps.
Automated driving requires highly reliable road information based on HD map data. While the creation of highway HD maps is under way, this coverage represents less than 1% of the worldwide road network.
The next challenge is to create and maintain maps for urban areas and local roads that go beyond the highway road network.
In this proof of concept, the two companies will place cameras in Toyota test vehicles to collect data over several months from areas of Tokyo.
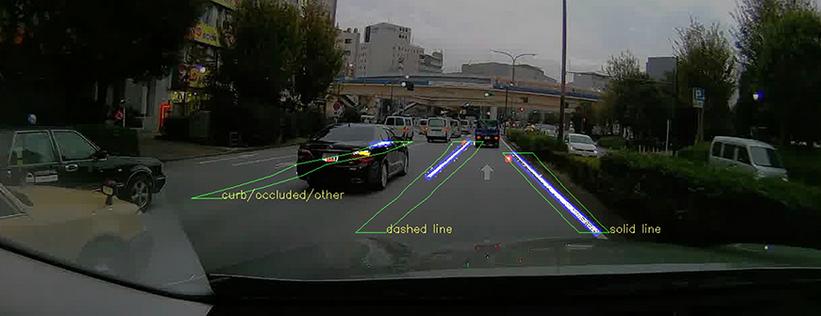
The cameras installed in the test vehicles use Toyota Safety Sense (TSS) components that Toyota installs on its vehicles globally. Images and other data gathered will be processed on Carmera’s real-time platform to automatically generate HD map data.
In addition, by placing commercially available “dashcam” drive recorders in Toyota test vehicles, the project will demonstrate automated map generation from a broader range of sources that do not have TSS.
This draws upon Carmera’s millions of miles of driving video collected, structured and enriched through safety monitoring partnerships with professional fleets in other complex environments like New York City.
By combining maps automatically generated via the techniques employed in this project with digital maps available today, it will be possible to provide even more reliable road information to automated vehicles in the future.
And by generating HD maps based on data acquired from commercially available vehicles around the world, automated driving can be enabled on all roads.